PEMBACA TAG RFID GUNA BUKA
TUTUP
PALANG PINTU
Fa’iq Zaimul Anam1,
Muhamad Abdul Jabbar Al ‘Aziiz2, Samuel Beta3
Prodi Teknik Elektronika Jurusan Teknik Elektronika Politeknik
Negeri Semarang
Jl. Prof. H. Soedarto, SH, Tembalang, Semarang,
50275
Intisari –
Pada modul
ini RFID kami gunakan untuk identifikasi kartu dan untuk buka tutup palang
pintu. RFID yang kami gunakan yaitu RC522 dengan frekuensi kerja 13,56 MHz,
sebuah motor servo dengan tipe MG 996R yang digunakan untuk membuka dan menutup
palang pintu, dan sebuah LCD 2x16 untuk menampilkan nomer ID yang dibaca. Untuk
mengaplikasikan modul ini kami menggunakan Mikrokontroler Arduino UNO.
Kata
Kunci : Arduino UNO,
RFID RC522, Motor Servo, LCD 2x16.
Abstract
– In this module we use RFID for
identification cards and to open the lid latch. RFID which we use that RC522
with working frequency of 13.56 MHz, a servo motor with 996R MG type that is
used to open and close the latch, and a 2x16 LCD to display the ID number is
read. To apply this module we use Microcontroller Arduino UNO.
I. Pendahuluan
RFID adalah proses identifikasi seseorang atau objek dengan
menggunakan frekuensi transmisi radio. RFID menggunakan frekuensi radio untuk
membaca informasi dari sebuah device kecil yang disebut tag atau transponder
(transmitter+responder). Tag RFID akan mengenali diri sendiri ketika mendeteksi
sinyal dari device yang kompatibel, yaitu pembaca RFID (Micro-Reader).
RFID merupakan teknologi identifikasi yang fleksibel, mudah
digunakan, dan sangat cocok untuk operasi otomatis. RFID mengkombinasikan
keunggulan yang tidak tersedia pada teknologi identifikasi yang lain. RFID
dapat disediakan dalam bentuk tag yang hanya dapat dibaca saja (Read Only) atau
dapat dibaca dan ditulis (Read/Write), tidak memerlukan kontak langsung maupun
jalur cahaya untuk dapat beroperasi, dapat berfungsi pada berbagai variasi
kondisi lingkungan, dan menyediakan tingkat integritas data yang tinggi.
Sebagai tambahan, karena teknologi ini sulit dipalsukan, maka RFID dapat
menyediakan tingkat keamanan yang tinggi.
II. Tinjauan Pustaka
Untuk mengetahui berbagai komponen dan peralatan yang
dibutuhkan, maka disusunlah tinjauan pustaka sebagai acuan dalam merancang dan
membuat aplikasi menggunakan Arduino ini.
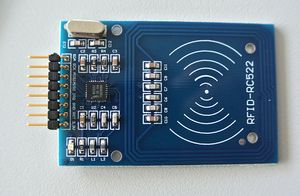
A.
RFID RC522
Mifare RC522 RFID Reader Module adalah sebuah modul berbasis
IC Philips MFRC522 yang dapat membaca RFID dengan penggunaan yang mudah dan
harga yang murah, karena modul ini sudah berisi komponen-komponen yang
diperlukan oleh MFRC522 untuk dapat bekerja. Modul ini dapat digunakan langsung
oleh MCU dengan menggunakan interface SPI, dengan supply tegangan sebesar 3,3V.
MFRC522 merupakan produk dari NXP yang menggunakan fully
integrated 13.56MHz non-contact communication card chip untuk melakukan
pembacaan maupun penulisan. MFRC522 support dengan semua varian MIFARE Mini,
MIFARE 1K, MIFARE 4K, MIFARE Ultralight, MIFARE DESFire EV1 and MIFARE Plus RF
identification rotocols.
Spesifikasi dari modul ini diantaranya:
Spesifikasi dari modul ini diantaranya:
1.
Working
current:13—26mA/ DC 3.3V
2.
Standby
current:10-13mA/DC 3.3V
3.
sleeping
current:<80uA
4.
peak
current:<30mA
5.
Frekuensi
kerja:13.56MHz
6.
Jarak
pembacaan :0~60mm(mifare1 card)
7.
Protocol:SPI
8.
Kecepatan
komunikasi data hingga 10Mbit/s
9.
Support:mifare1
S50、mifare1 S70、mifare UltraLight、mifare Pro、mifare Desfire
10.
Max
SPI speed: 10Mbit/s
Dalam paket penjualan sudah termasuk :
1.
Mifare
RC522 RFID Reader Module - 13.56Mhz
2.
RFID
Tag berbentuk gantungan kunci 13.56MHz
3.
RFID
Card 13.56MHz
4.
Pin
header bengkok 8 pin
5.
Pin
header lurus 8 pin

Gambar 1. Sensor
RFID
B. MOTOR
SERVO
Motor servo adalah sebuah perangkat atau aktuator putar
(motor) yang dirancang dengan sistem kontrol closed feedback (umpan balik loop
tertutup), sehingga dapat di atur untuk menetukan dan memastikan posisi sudut
dari poros output motor, di mana posisi dari motor akan diinformasikan kembali
ke rangkaian kontrol yang ada di dalam motor servo. Motor servo merupakan
perangkat yang terdiri dari motor DC, rangkaian gear , potensiometer dan
rangkaian kontrol. Rangkaian gear yang ada pada poros motor DC akan
memperlambat putaran poros dan meningkatkan torsi motor servo, sedangkan
potensiometer dengan perubahan resistansinya saat motor berputar berfungsi
sebagai penentu batas posisi putaran poros motor servo.
Motor servo dikendalikan dengan dengan memberikan sinyal
modulasi lebar pulsa (Pulse Wide Modulation/PWM) melalui kabel kontrol. Lebar
pulsa sinyal kontrol yang diberikan akan menentukan posisi sudut putaran dari
poros motor servo.

Gambar 2. Motor Servo
Penggunaan sistem kontrol loop tertutup pada motor servo
berguna untuk mengontrol gerakan dan posisi akhir dari poros motor servo.
Posisi poros output akan di sensor untuk mengetahui posisi poros sudah tepat
seperti yang diinginkan atau belum dan jika belum, maka kontrol input akan
mengirim sinyal kendali untuk membuat posisi poros tersebut tepat pada posisi
yang diinginkan.
Berdasarkan prinsipnya jadi motor servo dapat digunakan
sebagai output dari hasil penyeleksi botol berlabel, Jadi saat pada botol
terdapat label, maka poros akan berputar ke arah kiri dan saat tidak ada label
pada botol, maka poros akan berputar ke arah kanan.
C. LCD
LCD (Liquid Crystal Display) adalah modul penampil yang
banyak digunakan karena tampilannya menarik. LCD yang paling banyak digunakan
saat ini ialah tipe M1632 karena harganya cukup murah. LCD M1632 merupakan
modul LCD dengan tampilan 2×16 (2 baris x 16 kolom) dengan konsumsi daya
rendah. Modul tersebut dilengkapi dengan mikrokontroler yang didesain khusus
untuk mengendalikan LCD. Untuk rangkaian interfacing, LCD tidak banyak
memerlukan komponen pendukung. Hanya diperlukan satu variable resistor untuk
memberi tegangan kontras pada matriks LCD.
Dengan menggunakan CodeVision AVR, pemrograman untuk
menampilkan karakter atau string ke LCD sangat mudah karena didukung library
yang telah disediakan oleh CodeVision AVR itu sendiri. Kita tidak harus
memahami karakteristik LCD secara mendalam, perintah tulis dan inisialisasi
sudah disediakan oleh library dari CodeVision AVR.

Gambar 3. LCD 2x16
D.
Arduino UNO
Arduino UNO adalah board mikrokontroler berbasis
ATmega328. Uno memiliki 14 pin digital input/output (dimana 6 dapat digunakan
sebagai output PWM), 6 input analog, resonator keramik 16 MHz, koneksi USB,
jack listrik, header ICSP, dan tombol reset. Uno dibangun berdasarkan apa yang
diperlukan untuk mendukung mikrokontroler, sumber daya bisa menggunakan power
USB (jika terhubung ke komputer dengan kabel USB) dan juga dengan adaptor atau
baterai.
Arduino Uno berbeda dari semua papan sebelumnya dalam hal tidak menggunakan FTDI chip driver USB-to-serial. Sebaliknya, fitur Atmega16U2 (Atmega8U2 sampai versi R2) diprogram sebagai konverter USB-to-serial. Revisi 2 dari Uno memiliki resistor pulling 8U2 HWB yang terhubung ke tanah, sehingga lebih mudah untuk menggunakan mode DFU.
Arduino Uno berbeda dari semua papan sebelumnya dalam hal tidak menggunakan FTDI chip driver USB-to-serial. Sebaliknya, fitur Atmega16U2 (Atmega8U2 sampai versi R2) diprogram sebagai konverter USB-to-serial. Revisi 2 dari Uno memiliki resistor pulling 8U2 HWB yang terhubung ke tanah, sehingga lebih mudah untuk menggunakan mode DFU.

Gambar 5. Arduino UNO
Spesifikasi :
|
Mikrokontroler
|
ATmega328
|
|
Tegangan Operasi
|
5 Volt
|
|
Input Voltage (disarankan)
|
7 - 12 Volt
|
|
Input Voltage (batas akhir)
|
6 - 20 Volt
|
|
Digital I/O Pin
|
14 (6 pin sebagai output PWM)
|
|
Analog Input Pin
|
6
|
|
Arus DC per pin I/O
|
40 mA
|
|
Arus DC untuk pin 3.3V
|
50 mA
|
|
Flash Memory
|
32 KB (ATmega328) 0,5 KB untuk bootloader
|
|
SRAM
|
2 KB (ATmega328)
|
|
EEPROM
|
1 KB (ATmega328)
|
|
Clock Speed
|
16 MHz
|
III.
PERANCANGAN ALAT
A. Perangkat Keras dan
Rangkaian Elektronika
Adapun sistem yang digunakan yaitu :
1. RFID
RC522
2. Kartu
Tag RFID
3. Motor
Servo
4. LCD 2x16
B.
Blok Diagram Hubungan Komponen Utama
Blok diagram
aplikasi Arduino UNO menggunakan masukan Tag RFID, dengan luaran tampilan LCD
2x16 dan motor servo dapat dilihat pada gambar dibawah ini :

Gambar
6. Blok Diagram Komponen
Utama
C. Perangkat Lunak
Untuk
diagram alir, program aplikasi Arduino UNO
menggunakan masukan RFID
dan keluaran berupa tampilan LCD 2x16 dan sebuah motor servo.
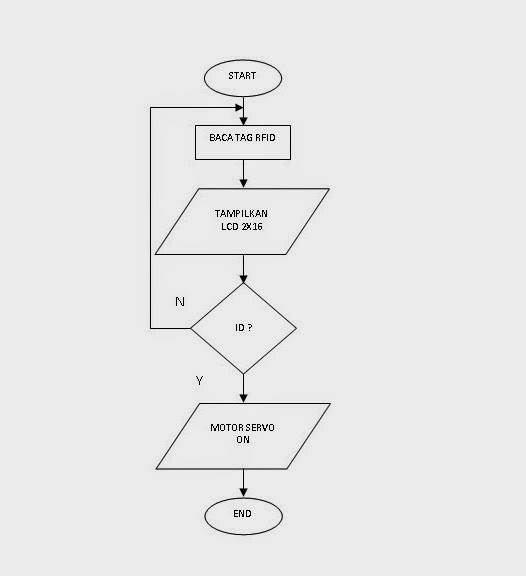
Gambar 7. Diagram Alir
IV. Pengujian Alat
Saat tag RFID didekatkan pada pembaca RFID, ID dari tag
RFID akan dibaca dan diproses di dalam mikrokontroler ARM agar ID yang di baca
akan ditampilkan pada tam[ilan LCD 2x16, jika ID yang dibaca sesuai maka motor
servo akan bergerak, dalam alat ini motor servo difungsikan untuk menggerakkan
palang pitu.
V. KESIMPULAN
Setelah melakukan percobaan, pengambilan data, dan
penganalisaan terhadap data yang telah didapat pada penelitian ini, maka
didapatkan kesimpulan yaitu sebagai berikut:
1. RFID dan
tag RFID yang kami gunakan bekerja pada frekuensi 13,56 MHz.
2. Setelah
tag RFID dibaca, ID yang dibaca akan ditampilkan pada tampilan LCD 2x16.
3. Motor
servo akan bekerja sebagai pembuka palang pintu jika ID yang dibaca sesuai.
4.
Motor servo tidak akan bekerja sebagai
pembuka palang pintu jika ID yang dibaca sesuai.
REFERENSI
diakses pada 14 Januari 2015
diakses pada 14 Januari 2015
diakses pada 14 Januari 2015
diakses pada 03 Februari 2015

Nama penulis
Fa’iq Zaimul Anam. Penulis
dilahirkan di kabupaten Temanggung 06 juni 1994. Penulis telah menempuh
pendidikan formal di TK Al Hidayah,
SDN 1 Jampiroso Temanggung, SMP N 3
Temanggung, dan SMA N 3 Temanggung. Tahun 2012 penulis telah menyelesaikan
pendidikan SMA. Pada tahun 2012 penulis mengikuti seleksi mahasiswa baru
diploma (D3) dan diterima menjadi mahasiswa baru diploma (D3) di kampus
Politeknik Negeri Semarang (Polines) dengan Program Studi D3 Teknik
Elektronika, Jurusan Teknik Elektro. Penulis terdaftar dengan NIM. 3.32.12.2.06.
Apabila ada kritik, saran dan pertanyaan mengenai penelitian ini, bisa
menghubungi anam_faiq@yahoo.co.id.

Nama penulis
Muhammad Abdul Jabbar Al ‘Aziiz.
Penulis dilahirkan di Madiun tanggal 5 Mei
1994. Penulis telah menempuh pendidikan formal di TK Assalamah, SDN Ungaran 3, SMP N 1 Ungaran, dan SMA N 1 Ungaran. Tahun 2012 penulis telah
menyelesaikan pendidikan SMA. Pada tahun 2012 penulis mengikuti seleksi
mahasiswa baru diploma (D3) dan diterima menjadi mahasiswa baru diploma (D3) di
kampus Politeknik Negeri Semarang (Polines) dengan Program Studi D3 Teknik
Elektronika, Jurusan Teknik Elektro. Penulis terdaftar dengan NIM. 3.32.12.2.12.
Apabila ada kritik, saran dan pertanyaan mengenai penelitian ini, bisa
menghubungi muhammadaziiz01@gmail.com.










{kind=link}